 平台热线
平台热线





KUKA 库卡线性单元的配置(上)—— Offset 校准
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
今天,我们要讲的内容同样具备实操性,那就是“线性单元的Offset校准”.
可能出现的问题
正常情况线性单元不需要特别校准。在 WorkVisual 配置好 ROBROOT 运动系统的转换数值即可。
但有时候在使用直线轴测试外部运动系统时,可能工具的 TCP 位置会出现少量的变化,在某些特殊应用要求程序轨迹精度比较高的应用场合,就无法达到客户要求(比如摆动应用等)。
问题分析
理想情况下,机器人的 ROBROOT 坐标系应与线性单元的 FLANGE 坐标系相同。 实际上,通常会出现安装误差,导致这两个坐标系会存在轻微的差异,这意味着使用外部轴运动坐标系时 TCP 的位置会出现偏差。 如果在机器人控制器里安装了 KSS 8.3,则可以通过线性单元的 Offset 校准,来对这些差异进行示教校正。
接下来进入实操环节
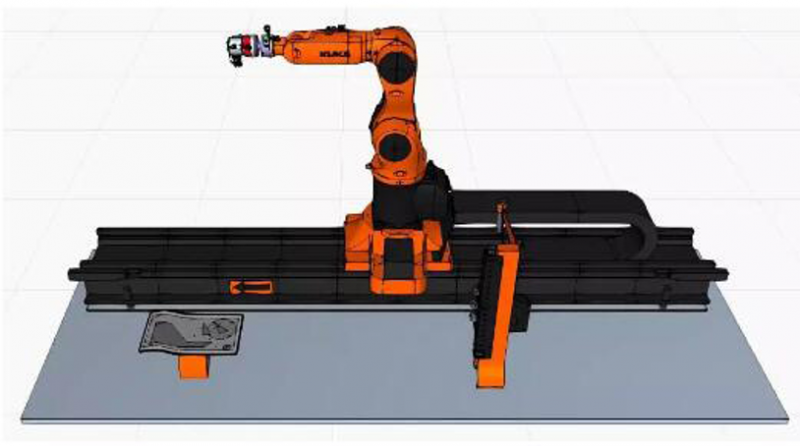
在具体的校准操作上,我们同样使用 KUKA KL‐100 配置运动系统来示例。
线性单元的 Offset 校准——标定步骤:
Step1 点击菜单:投入运行→测量→外部运动装置→线性滑轨

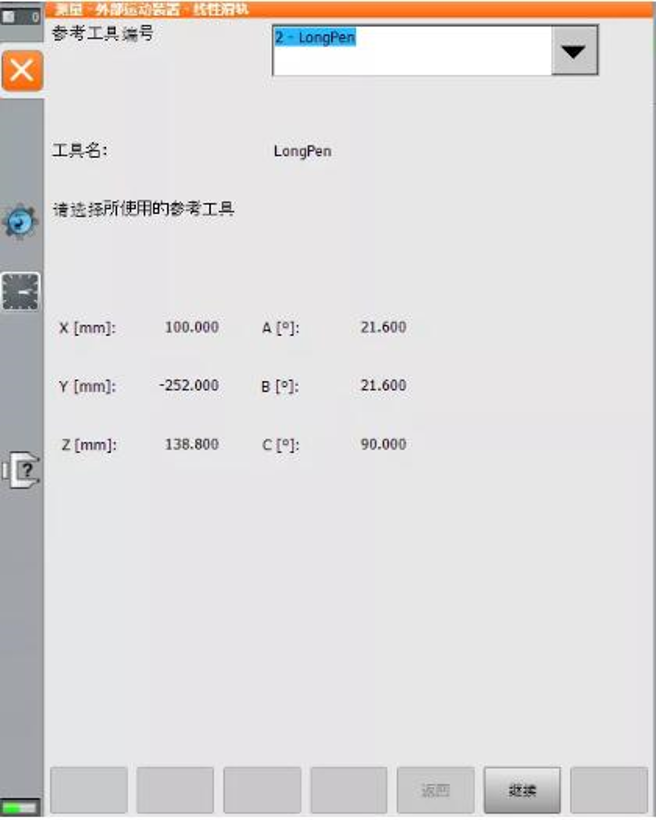
Step2 选好参考工具,点击按钮继续。
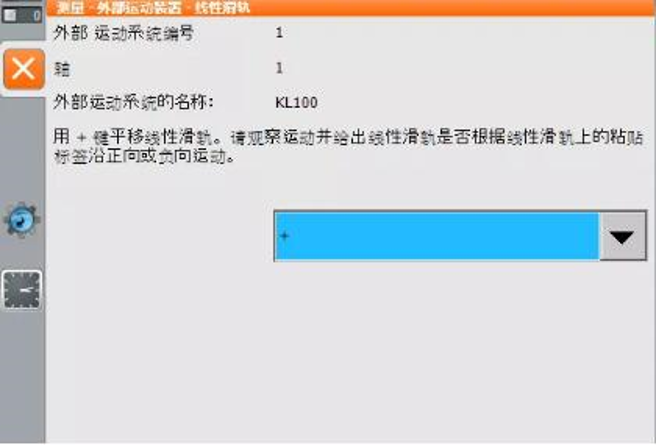
Step3 确定好线性滑轨的移动方向,点击按钮继续。
Step4 移动参考工具TCP到参考点,点击按钮测量。

将测量工具的TCP从3个不同外部轴位置,移向设定的参考点。
机器人控制系统从三个不同的位置中计算出Offset。
在此处联系我们或致电与我们联系,以获取有关库卡机器人解决方案和快速简便的报价。
了解更多库卡机器人示教器,库卡机器人控制柜,请咨询:库卡机器人备件